Baseline UAV Scenario
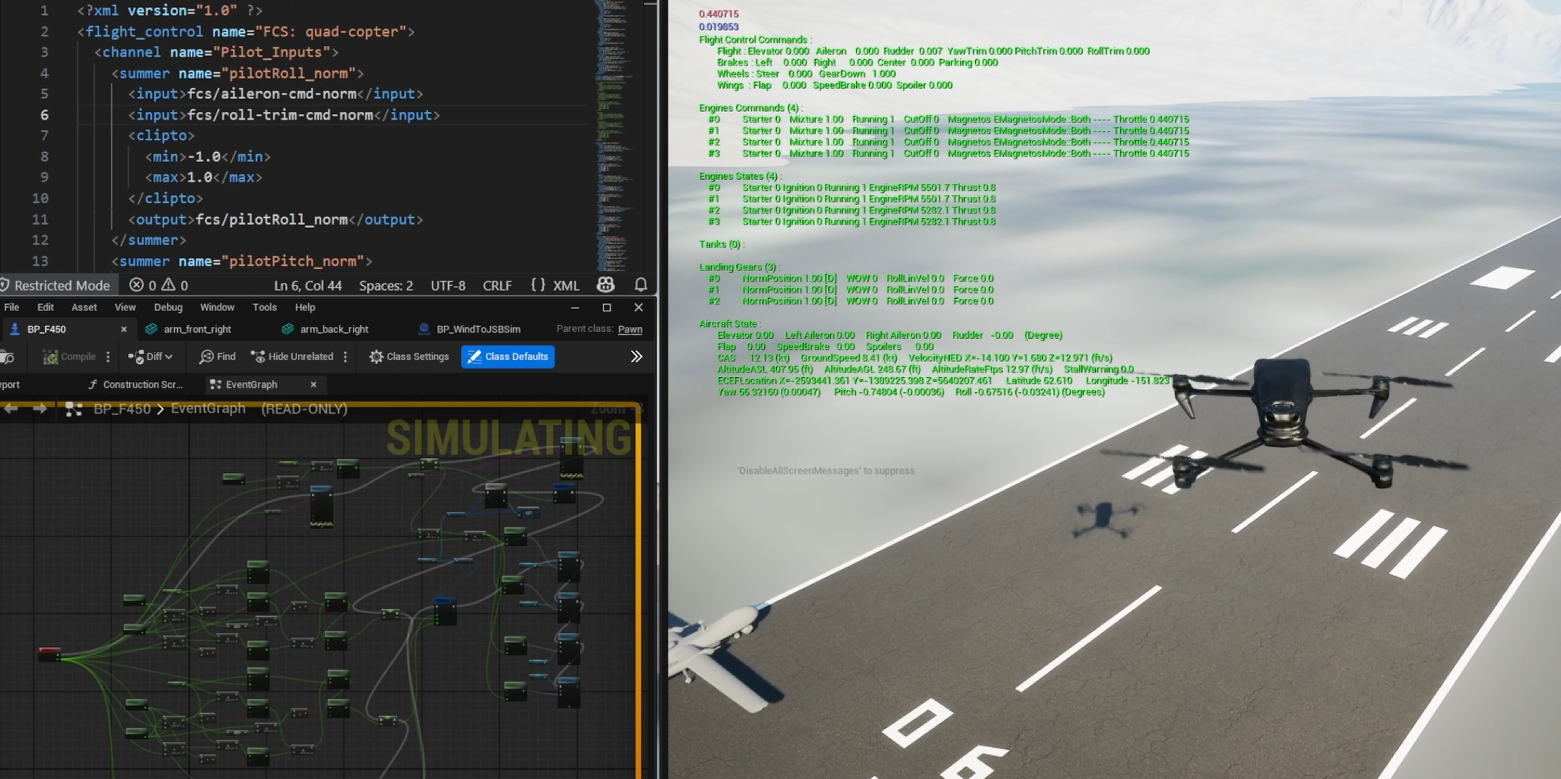
General UAV operation in the simulation environment.

General UAV operation in the simulation environment.
Control stabilization behavior under active SCAS logic.
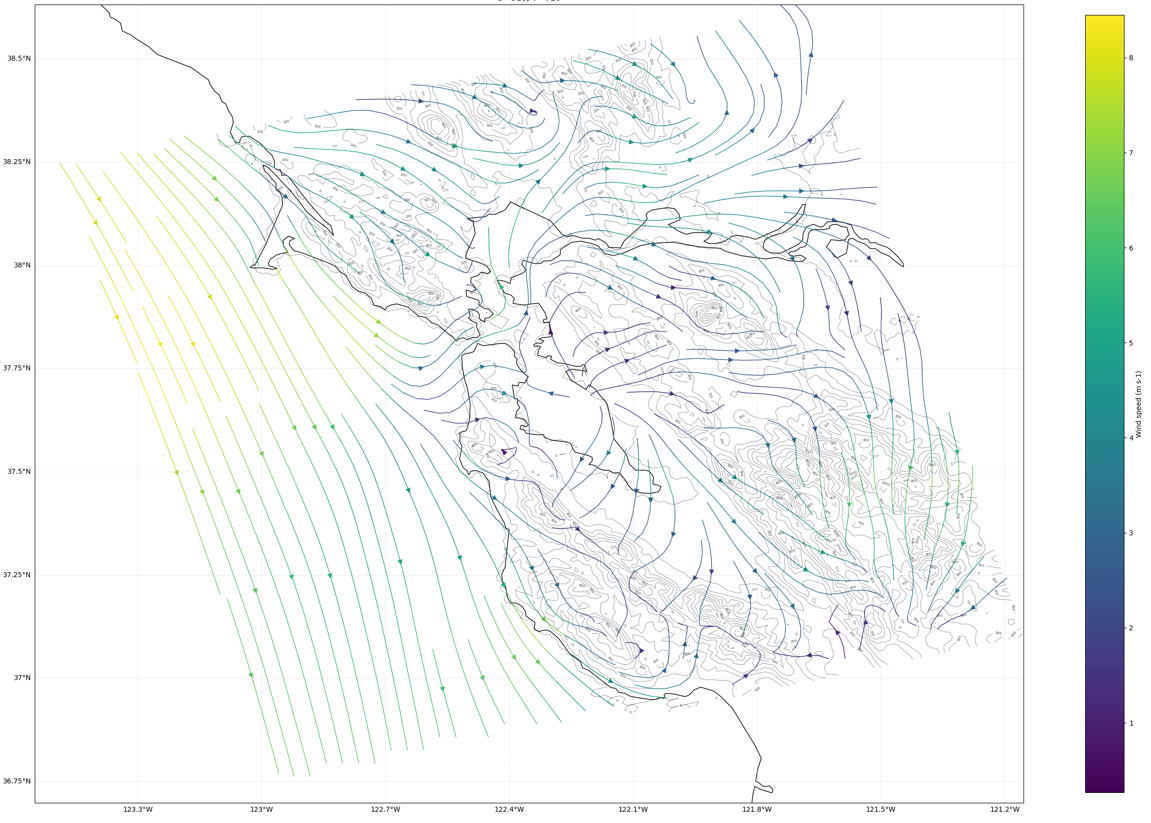
High-wind mission case with terrain-driven disturbances.
Wildfire-influenced airflow and visibility stress testing.